背负型双向磁导航植保无人车
发布时间:2021-04-14 浏览:4973次
温室大棚内湿度大、温度高及各种农药和肥料的广泛使用使大棚内产生多种有害物,同时对大棚长期作业人员的健康也产生不良影响。因此,研究院根据日本农户的需求,研制出一款应用于大棚内,能自动按照预定路线实现自主喷洒农药的无人车。
植保无人车采用基于磁传感器的导航方式实现预定路线自主作业。定位系统基于地标传感器实现,控制器会根据读取到的地标值控制无人车的加减速、自主路线选择、自动启停、自动喷洒和停止喷洒农药。在安全方面做了冗余设计,避障系统包含物理避障和激光雷达传感器。图1分别是激光雷达和障碍物扫描结果,通过运算平台获取激光雷达点云数据,然后对数据进行滤波处理,获取到一定(可由用户设定)角度范围内的距离信息发送给无人车的控制器,根据距离的大小进行减速或者停止。
植保无人车研制的难点之一在于控制系统设计,控制系统关系植保无人车能否稳定运行。植保无人车控制器采用高性能嵌入式处理器,能够实时监测各种传感器的数据,做出相应的动作。植保无人车采用模糊自适应PID算法实现车体的运动控制,确保车体稳定运行。
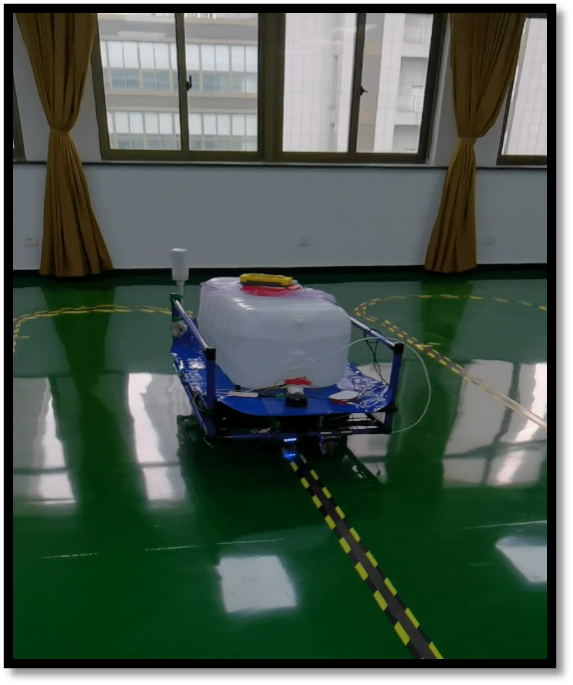
图2 样车运行效果图
如图2样车测试图所示,植保无人车在铺设的磁条上能够稳定运行,在遇到障碍物时停止运行,移除障碍物后,植保无人车能自动恢复运行。在需要喷洒农药时开启喷头,不需要时停止喷洒。同时兼有手动功能,通过遥控器可方便移动植保无人车到达指定地点。
上一篇:镜片瑕疵检测系统
